Ę■äšÖCŲ„╚╦Ąū▒PŻ¼┐╔ęį└ĒĮŌ×ķÖCŲ„╚╦Ą─Ī░─_Ī▒Ż¼ąĶę¬ūįų„ęŲäėĄ─ÖCŲ„╚╦Ż¼Äū║§Č╝ąĶę¬ėąŽ±äōØ╔ųŪ─▄ęŲäėĄū▒PŻ¼ų¦│ųČ■┤╬ķ_░l╗“Č©ųŲ╗»Ę■䚯¼▀MČ°īŹ¼FĘ■äšÖCŲ„╚╦╔╠śI╗»┬õĄžĪŻ
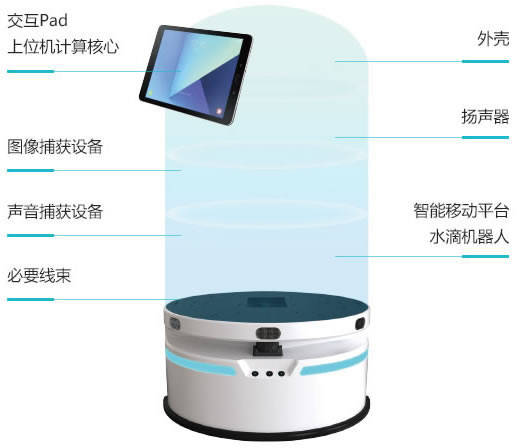
╗∙ė┌äōØ╔ųŪ─▄ęŲäėĄū▒PŻ¼ÖCŲ„╚╦Ų¾śI┐╔ęį═©▀^┤Ņ▌dözŽ±Ņ^Īó╝t═Ō╠ĮŅ^Īóé}ā”╣±ĪóŪÕÆ▀Ų„ĪóÖCąĄ▒█ĪóņF╗»Ų„Ą╚╔Žīė╣”─▄─ŻēKŻ¼īŹ¼F╩ęā╚┼õ╦═Īóč▓ÖzĪóŪÕØŹĪóŽ¹ČŠĪóėŁ┘eÖCŲ„╚╦Ą─ķ_░lĪŻ
äōØ╔ųŪ─▄ęŲäėĄū▒P╩Ū─ŻēK╗»Ą─Ż¼ų¦│ų┐═æ¶▀MąąČ■┤╬ķ_░l╗“Č©ųŲŻ¼Š▀éõžSĖ╗Ą─ķ_░lĮė┐┌Ż¼ėąķ_░ląĶŪ¾Ą─┐═æ¶▓╔┘Å▓®ĢrĮ▌ųŪ─▄ęŲäėĄū▒Pū„×ķÖCŲ„╚╦Ąū▒PŻ¼┐╔£p╔┘┤¾░ļĄ─ķ_░lĢrķg┼cļyČ╚Ż¼Š═─▄▌p╦╔½@Ą├ę╗╠ū═Ļš¹Ą─Ę■äšÖCŲ„╚╦ĮŌøQĘĮ░ĖĪŻ
1 ų¦│ųŠW┐┌Īó┤«┐┌ČÓĘN▀BĮėĘĮ╩ĮĪŻ
2 ūųĘ¹┤«šłŪ¾Ż¼JSONūųĘ¹┤«╗žÅ═Ż¼¤oąĶ▐D┴xĪŻ
3 ½@╚ĪĄū▒PĀŅæBĪó┐žųŲĄū▒PęŲäėĄ╚ČÓĘNAPI├³┴ŅŻ¼ļSĢrŠSūoąį║═öUš╣Ż¼±Ņ║Žą═ÅŖĪŻ
╗∙ė┌äōØ╔▌å╩ĮÖCŲ„╚╦Ąū▒PČ°═Ļ│╔╔Žīėæ¬ė├Ą─Ę■äšÖCŲ„╚╦ęčį┌Ė„┤¾Lė“▒╗ÅVĘ║æ¬ė├Ż¼╚ńųŪ─▄Ę■äšÖCŲ„╚╦äōäōĪóŽ¹ČŠÖCŲ„╚╦ę┴═▐Īó┼õ╦═ÖCŲ„╚╦─┐─┐Ą╚ĪŻę└┐┐äōØ╔ūį蹥─Gąį─▄Č©╬╗ī¦║Į╝╝ągŻ¼┐╔Ä═ų·Ė„ŅÉĘ■äšÖCŲ„╚╦īŹ¼FÅ═ļsł÷Š░Ą─ųŪ─▄ęŲäėĪŻ
ļŖįÆ
õN╩█1Ż║4006-935-088 õN╩█2Ż║4006-937-088
ārĖ±
ārĖ±Ż║├Ō┘M½@╚Ī
äōØ╔╩ęā╚ÖCŲ„╚╦ęŲäėĄū▒P╝»│╔ļŖ╠▌▀ē▌ŗ,ę╗µI║¶╠▌,ßśī”ÖCŲ„╚╦ČÓśŪīėųŪ─▄┼õ╦═,Ž¹Üó,č▓ÖzĄ╚╔╠ė├Ę■äšł÷Š░,▓óī”ł÷Š░▀Mąąā×╗»╠Ä└Ē,īŹ¼FĖ³ČÓ╔╠ė├ārųĄ
äōØ╔▌å╩ĮÖCŲ„╚╦Ąū▒P▓╔ė├Š½╝Ü╗»ĄžłDśŗĮ©╝╝ąg,śŗĮ©│÷GŠ½Č╚,└Õ├ū╝ēäeĄžłD,į┌Å═ļsČÓūāĄ─ł÷Š░Ž┬ę▓─▄ū÷ĄĮäėæBūRäeŁhŠ│ųąĄ─╚╦╗“Ųõ╦¹šŽĄK╬’
SLAMĄžłDśŗĮ©Ą─▀^│╠Š═╩Ūė├╔ŅČ╚é„ĖąŲ„£y┴┐ÖCŲ„╚╦║═ų▄ć·ŁhŠ│Ą─ŠÓļxą┼Žó,Å─Č°═Ļ│╔ī”ų▄▀ģŁhŠ│Ą─ĄžłDśŗĮ©,ÖCŲ„╚╦Ģ■ī”ŁhŠ│▀Mąąę╗ų┬ąįÖz▓ķ,ĮK═Ļ│╔ĄžłD
╚½Ž“ęŲäėŲĮ┼_Ą─śŗą═ģóöĄąŻ£╩įŁ└Ē║═ĘĮĘ©Č╝ĘŪ│ŻŽÓ╦Ų,Ą½╩Ūę▓┤µį┌ę╗Č©▓Ņ«É,╚½Ž“ęŲäėÖCŲ„╚╦Ą─┘|┴┐Ęų▓╝ī”ÖCŲ„╚╦▀\äėŠ½Č╚╩Ū┤µį┌▌^┤¾ė░ĒæĄ─
Ž╚ĻU╩÷┴╦ģóöĄąŻ£╩Ą─╗∙▒ŠįŁ└Ē,▓ó░┤ššÖCŲ„╚╦śŗą═Ą─▓╗═¼³cĘų×ķā╔ŅÉ,Ęųäeī”ī”ĘQą═,łA╗Īą═ÖCŲ„╚╦▀Mąą┴╦└ĒšōĘų╬÷,╠ß│÷ąŻ£╩╦╝┬Ę,ĮY║ŽROSąŻ£╩demoĻU╩÷īŹ“×īŹ¼FĘĮĘ©
ĮķĮB┴╦ā╔▌å▓Ņ╦┘“īäėÖCŲ„╚╦┼c╦─▌å“īäėÖCŲ„╚╦,┬─Ħ╩ĮÖCŲ„╚╦Ą─ąŻ£╩įŁ└Ē,ĘĮĘ©╝░ŲõąŻ£╩ĘĮĘ©┤µį┌▓Ņ«ÉĄ─įŁę“,║¾ĮY║ŽROS ąŻ£╩demoĻU╩÷īŹ“×īŹ¼FĘĮĘ©
Ž─z▌å┐┤ŲüĒ×ķŲš═©īŹļHæ¬ė├ÅVĘ║;ų▒ąą▒╗äė▌å▒╗æ¬ė├ė┌╩ęā╚ł÷Š░;¹£┐╦╝{─Ę▌å╚½Ž“ęŲäė▀mė├ė┌╩ęā╚¬MšŁł÷Š░;╚fŽ“▌å╠ß╣®ØLäė╣”─▄ĮĄĄ═▀\äė─”▓┴
ĘŪ╚½Ž“ęŲäėÖCŲ„╚╦į┌ŲĮ├µ╔Ž▀\äėāHėą2éĆūįė╔Č╚;╚½Ž“ęŲäėÖCŲ„╚╦▓╔ė├┴╦¹£▌å/╚½Ž“▌å,ņ`╗ŅąįĖ³║├;╦─“ī╦─▐DÖCŲ„╚╦╩ę═ŌĘŪĮYśŗ╗»ł÷Š░Ą─▀mæ¬─▄┴”Ė³ÅŖ
▌å╩ĮÖCŲ„╚╦Ąū▒P┐╦╝{─Ę▌åĄ─▀\äėÖC└Ē╝░Ųõ¹£▌åŲĮ┼_▀\äė▀^│╠ųąĄ─╩▄┴”Ūķør,Ęų╬÷┴╦ļŖÖC▐D╦┘-¹£▌åīŹļH▀\äė╦┘Č╚-¹£▌åŲĮ┼_ųąą─³c╦┘Č╚ų«ķgĄ─ĻPŽĄ
¹£▌åŲĮ┼_Ą─╚½Ž“ęŲäėą¦╣¹╩Ū═©▀^╦─éĆ¹£┐╦╝{─Ę▌åģf═¼▐DäėČ°▀_ĄĮĄ─,Č°╚½Ž“▌åęŲäėŲĮ┼_┼cų«ŅÉ╦Ų,ę▓═©▀^╚²╗“╦─éĆ╚½Ž“▌åģf═¼▐DäėČ°īŹ¼F╚½Ž“ęŲäėĄ─
Ęų╬÷┴╦╚½Ž“▌åŲĮ┼_3ĘN│ŻęŖ▀\äė─Ż╩ĮĄ─ęÄ┬╔╝░ÖC└Ē,ų▓Įįö╝ÜŲ╩╬÷┴╦╚½Ž“▌å▀\äė▀^│╠ųąCENTER³c╦┘Č╚┼c╚½Ž“▌åīŹļH╦┘Č╚,ųĖ│÷╚½Ž“▌åŲĮ┼_╚½Ž“╠žąįĄ─ā×ä▌╝░Ųõų„ę¬æ¬ė├ł÷Š░
▌å╩ĮÖCŲ„╚╦Ąū▒PįŁ└ĒłDīó╦─▌å“īäėęŲäėÖCŲ„╚╦Ą─▀\äė─Żą═║å╗»Ą╚ą¦╠Ä└Ē×ķā╔▌å▓Ņ╦┘“īäėÖCŲ„╚╦Ą─▀\äė─Żą═,Ęų╬÷┴╦SSMR¬ÜėąĄ─▀\äė╠žąį





