

3.1 ģóöĄąŻ£╩ĘĮĘ©╦╝┬Ę
ģó┐╝ĪČ▓Ņ╦┘“īäėÖCŲ„╚╦▌åķgŠÓąŻ£╩ĪĘĄ─╦╝┬ĘŻ║┐žųŲÖCŲ„╚╦ū÷ūįą²▀\äėŻ¼▀\äėĄĮ─┐ś╦╬╗ū╦║¾═Żų╣Ż¼ė^▓ņÖCŲ„╚╦īŹļH═Żų╣╬╗ū╦┼c└Ēšō═Żų╣╬╗ū╦Ą─Ų½▓ŅŻ¼š{š¹śŗą═ģóöĄŻ¼ęį▒M┐╔─▄┐sąĪŲ½▓ŅĪŻ
×ķ╩▓├┤┐╔ęį▓╔ė├╔Ž╩÷ūįą²ĘĮ╩ĮüĒąŻ£╩╔Ž╩÷ā╔ĘN╚½Ž“ęŲäėŲĮ┼_Ą─śŗą═ģóöĄŻ┐
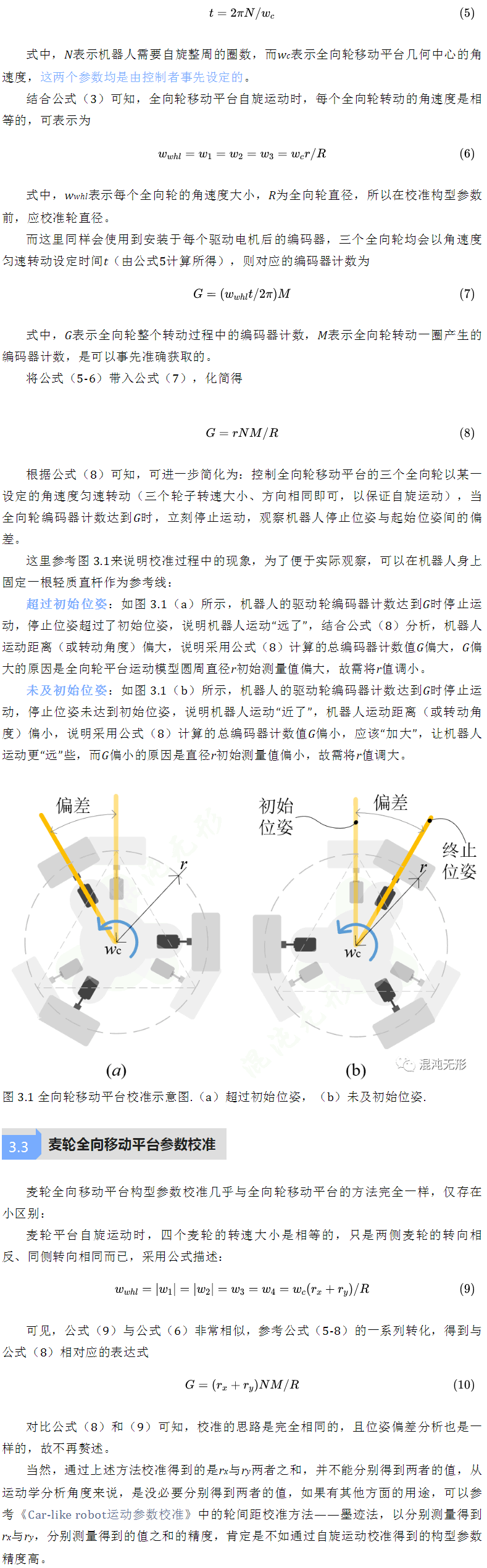
ė^▓ņ╣½╩ĮŻ©3-4Ż®Ż¼«ö╚½Ž“ÖCŲ„╚╦āHū÷ūįą²▀\äėĢrĄ─▀\äėīWĘĮ│╠Ż¼╦∙ėą“īäė▌åĄ─▐D╦┘┤¾ąĪŽÓ═¼Ż¼į┌▌åų▒ÅĮę蹯£╩Ą─Ū░╠ߎ┬Ż¼╦∙ėą“īäė▌å░┤ššįOČ©┤¾ąĪĄ─▐D╦┘│»įOČ©Ą─ĘĮŽ“▐DäėŻ¼─Ū├┤ÖCŲ„╚╦īóĢ■ęį┤_Č©Ą─ĮŪ╦┘Č╚└@Äū║╬ųąą─ą²▐DŻ¼╚ń╣¹ÖCŲ„╚╦Äū║╬ųąą─ĮŪ╦┘Č╚╩Ū£╩┤_Ą─Ż¼ät▀\äėįOČ©Ģrķg║¾Ż¼ÖCŲ„╚╦Ģ■═Ż┴¶į┌┤_Č©Ą─╬╗ū╦Ż©╩Ū┐╔═©▀^▀\äėīWĘĮ│╠ėŗ╦ŃĄ─Ż®Ż¼╝┘╚ń═Ż┴¶Ą─īŹļH╬╗ū╦║═└Ēšōėŗ╦Ń╬╗ū╦▓╗ųž║ŽŻ¼ätšf├„╣½╩ĮŻ©3-4Ż®ųąĄ─ģóöĄ▓╗£╩┤_Ż¼ę▓Š═╩ŪÖCŲ„╚╦śŗą═ģóöĄ▓╗£╩┤_Ż¼╣╩ąĶ꬚{š¹śŗą═ģóöĄŻ¼ęįīŹ¼F╔Ž╩÷═Ż┴¶Ą─īŹļH╬╗ū╦║═└Ēšōėŗ╦Ń╬╗ū╦▒M┐╔─▄ųž║ŽŻ¼«ö╬╗ū╦ųž║ŽĢrī”æ¬Ą─śŗą═ģóöĄŠ═╩ŪīŹļH£╩┤_Ą─ģóöĄŻ¼ę▓Š═ąŻ£╩═Ļ│╔┴╦ĪŻ
3.2 ╚½Ž“▌åęŲäėŲĮ┼_ģóöĄąŻ£╩
╗∙ė┌╔Ž╩÷Ęų╬÷Ż¼▀@└’Ž╚ęį╚½Ž“▌åęŲäėŲĮ┼_×ķ└²Ż¼ĮY║Ž└Ēšō═Ųī¦Ż¼ĻU╩÷ąŻ£╩▀^│╠ĪŻ
═¼śėĄ─Ż¼×ķ▒Ńė┌ė^▓ņūįą²▀\äė═Żų╣║¾Ą─╬╗ū╦Ż¼╦∙ęįįOČ©ÖCŲ„╚╦ä“╦┘ūįą²š¹ų▄Ż¼▀@śė▒Ńė┌ī”▒╚ūįą²š¹ų▄Ū░║¾Ą─╬╗ū╦Ų½▓ŅŻ¼ūįą²š¹ų▄╦∙ąĶĢrķgt┐╔▒Ē╩Š×ķ
═©▀^Ū░╬─Ą─šōūCĘų╬÷Ż¼┐╔ęį┐┤│÷╚½Ž“ęŲäėŲĮ┼_Ą─śŗą═ģóöĄąŻ£╩įŁ└Ē║═ĘĮĘ©Č╝ĘŪ│ŻŽÓ╦ŲŻ¼Ą½╩Ūę▓┤µį┌ę╗Č©▓Ņ«ÉŻ║į┌ĪČ│ŻęŖęŲäėÖCŲ„╚╦ČÓĮŪČ╚ī”▒╚Ęų╬÷ĪĘę╗╬─ųąėą╠ߥĮŻ¼╚½Ž“ęŲäėÖCŲ„╚╦Ą─┘|┴┐Ęų▓╝ī”ÖCŲ„╚╦▀\äėŠ½Č╚╩Ū┤µį┌▌^┤¾ė░ĒæĄ─Ż¼┘|┴┐Ęų▓╝▓╗Š∙Ż¼╝┤╩╣┐žųŲÖCŲ„╚╦“īäė▌å▐D╦┘ŽÓ═¼Ż¼ę▓ļyęįīŹ¼F│÷╔½Ą─ūįą²▀\äėŻ¼Ūę¹£▌å╚½Ž“ęŲäėŲĮ┼_╩Ū4éĆ“īäė▌åŻ¼£╩┤_┐žųŲļyČ╚╩Ū▒╚╚½Ž“▌å╚½Ž“ŲĮ┼_ę¬┤¾Ą─Ż¼▀\äė┐žųŲĖ³ėąļyČ╚ĪŻ
Č°Å─Ū░╬─Ęų╬÷┐╔ų¬Ż¼š²┤_Ą─ąŻ£╩┴„│╠╩ŪŻ║Ž╚š{╣ØÖCŲ„╚╦┘|┴┐Ęų▓╝Ż¼▒ŻūCÖCŲ„╚╦─▄ē“ū÷ć└Ė±Ą─ų▒ŠĆ▀\äė║═ūįą²▀\äėŻ¼Įėų°į┘ąŻ£╩“īäė▌åĄ─▌åų▒ÅĮĪČ│ŻęŖęŲäėÖCŲ„╚╦▌åų▒ÅĮąŻ£╩ĪĘŻ¼║¾į┘ąŻ£╩▒Š╬─╠ߥĮĄ─śŗą═ģóöĄĪŻ
Ī░▐Dūį╬óą┼╣½▒Ŗ╠¢Ż║╗ņŃń¤oą╬Ī▒
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



