ÖCŲ„╚╦īWĮńī”ÖCąĄ╩ųĄ─▀\äėīW║═äė┴”īWęčĮø┴╦ĮŌĄ├ŽÓ«öČÓ├µ┴╦ĪŻ╚╗Č°Ż¼ÖCąĄ╩ųų„ ę¬┐╝æ]Ą─╩ŪĻP╣Ø▀\äėīW║═äė┴”īWĄ─┐žųŲå¢Ņ}Ż¼Č°ęŲäėÖCŲ„╚╦ų„ę¬┐╝æ]Ą─╩Ū┘|³c▀\äėīW║═äė┴” īW┐žųŲå¢Ņ}ĪŻÅ─ÖCąĄ║═öĄīW▒Š┘|╔ŽüĒšfŻ¼╦³éā╩Ū▓╗═¼Ą─ĪŻ
ęŲäėÖCŲ„╚╦ŽĄĮy─Żą═─┐Ū░┐╔Ęų×ķ▀\äėīW─Żą═║═äė┴”īW─Żą═ā╔┤¾ŅÉŻ¼ā╔ĘNŪķørŽ┬ÖCŲ„╚╦▀\ äė┐žųŲėą▓╗═¼Ą─┐žųŲūā┴┐ĪŻę╗ĘN×ķ╗∙ė┌▀\äėīW─Żą═Ą─╦┘Č╚┐žųŲŻ¼┴Ēę╗ĘN╩Ū╗∙ė┌äė┴”īW─Żą═Ą─ ┴”Šž┐žųŲĪŻ▒Š╣Øīóėæšōā╔▌åd┴ó“īäėĘĮ╩ĮĄ─ęŲäėÖCŲ„╚╦Ą─▀\äėīW─Żą═ĪŻ
ęį╦─▌åÖCŲ„╚╦×ķ└²Ż¼Ųõųą║¾├µā╔▌å╩Ūd┴ó“īäė▌åŻ¼Ū░├µā╔▌å╩Ū╚fŽ“▌åŻ¼ÖCŲ„╚╦Ą─▀\äėģóöĄ║═ū°ś╦ŽĄ
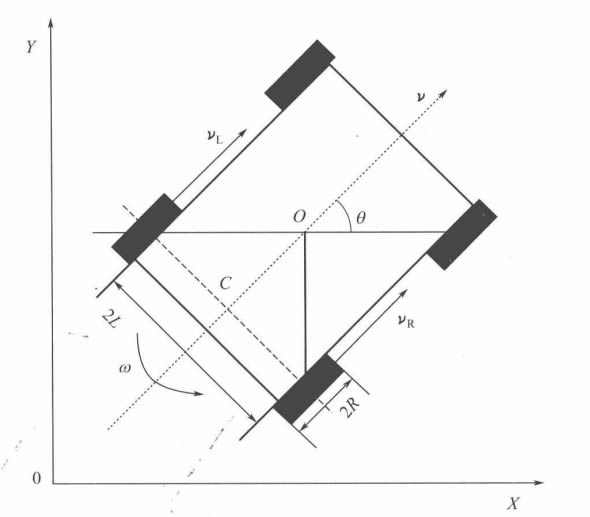
X ĪóY ×ķ╩└Įńū°ś╦ŽĄŻ╗
O: ×ķęŲäėÖCŲ„╚╦Ą─Äū║╬ųąą─Ż╗
C: ╩Ūā╔“īäė▌åĄ─▌å▌Sųąą─Ż╗
R: ▄ć▌å░ļÅĮŻ╗
2L: ā╔éĆ“īäė▌å▌åą─ķgĄ─ŠÓļxŻ╗
v: ÖCŲ„╚╦Ą─Ū░▀M╦┘Č╚Ż╗
w: ÖCŲ„╚╦▄ć¾wĄ─▐DäėĮŪ╦┘Č╚Ż╗
VL,VR: ÖCŲ„╚╦ū¾ėę▌åĄ─ŠĆ╦┘Č╚Ż╗
”╚:ÖCŲ„╚╦Ą─ū╦ä▌ĮŪŻ╗
╝┘įOÖCŲ„╚╦į┌╦«ŲĮ├µ▀\äė▓óŪę▄ć▌å▓╗Ģ■░l╔·ą╬ūāĪŻÖCŲ„╚╦ā╔éĆ╣╠Č©Ą─“īäė▌åė╔å╬dĄ─“ī äėŲ„Ęųäe“īäė┐žųŲŻ¼╝┘Č©▄ć▌å┼cĄž├µĮėė|³c╦┘Č╚į┌┤╣ų▒ė┌▄ć▌åŲĮ├µā╚Ą─Ęų┴┐×ķ┴ŃŻ¼“īäė▌å┼c Ąž├µĪ░ų╗─▄▐DäėČ°▓╗─▄╗¼äėĪ▒,ØMūѤo╗¼äėŚl╝■ĪŻį┌¤o╗¼äė╝āØLäėĄ─Śl╝■Ž┬Ż¼▌åūėį┌┤╣ų▒ė┌ ▌åŲĮ├µĄ─╦┘Č╚Ęų┴┐×ķ┴ŃŻ¼ŽĄĮy╝s╩°Śl╝■╚ńŽ┬Ż║
x sin”╚Ī¬ycos”╚=0
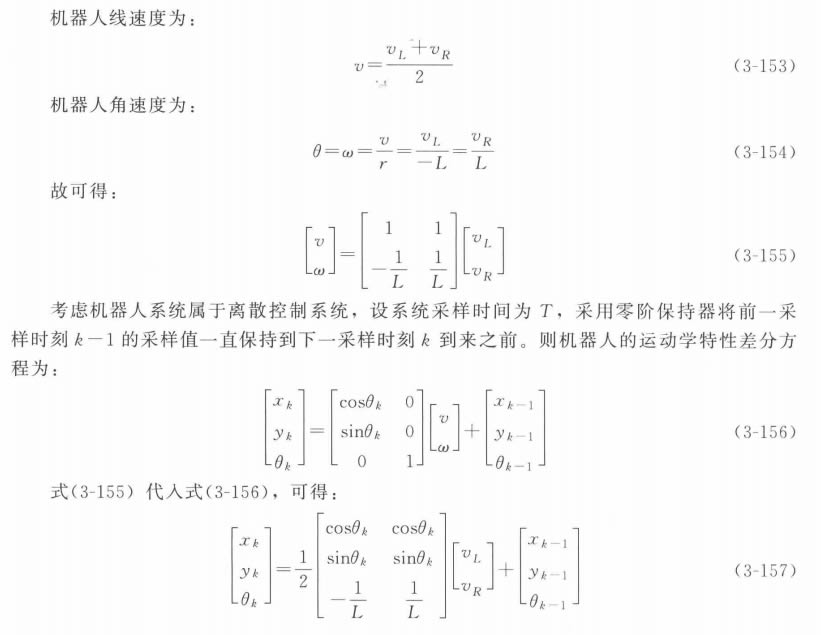
ęŲäėÖCŲ„╚╦─▄ē“ų▒Įė▀Mąą┐žųŲĄ─╩Ūā╔éĆd┴ó“īäėļŖÖCŻ¼ę“┤╦▓╔ė├ [vL,vR] ą╬╩ĮĄ─▌ö ╚ļ┐žųŲ┴┐Ż¼üĒĘųäe┐žųŲā╔éĆ“īäė▌åĪŻŽ┬├µėæšō╚ń║╬īóÖCŲ„╚╦Ą─Ū░▀M╦┘Č╚v ║═▐Däė╦┘Č╚w ▐D ╗»×ķÖCŲ„╚╦ā╔éĆ▌åūėĄ─ŠĆ╦┘Č╚v₁ ║═vRĪŻ
é„äėÖCśŗė├üĒ░č“īäėŲ„Ą─▀\äėé„▀fĄĮĻP╣Ø║═äėū„▓┐╬╗ĪŻÖCŲ„╚╦│Żė├Ą─é„äėÖCśŗėąĮzĖ▄é„äėÖCśŗĪó²X▌åé„äėÖCśŗĪó┬▌ą²é„äėÖCśŗĪóĦ╝░µ£é„äėĪó▀BŚU╝░═╣▌åé„äė
ęŲäėÖCŲ„╚╦Ą─ęŲäėÖCśŗą╬╩Įų„ę¬ėąŻ║▄ć▌å╩ĮęŲäėÖCśŗŻ╗┬─Ħ╩ĮęŲäėÖCśŗŻ╗═╚ūŃ╩ĮęŲäėÖCśŗĪŻ┤╦═ŌŻ¼▀Ćėą▓Į▀M╩ĮęŲäėÖCśŗĪó╚õäė╩ĮęŲäėÖCśŗĪó╗ņ║Ž╩ĮęŲäėÖCśŗ║═╔▀ąą╩ĮęŲäėÖCśŗĄ╚
ūįė╔Č╚╩ŪųĖÖCŲ„╚╦╦∙Š▀ėąĄ─¬Ü┴óū°ś╦▌S▀\äėĄ─öĄ─┐,┐╔─▄╔┘ė┌6éĆūįė╔Č╚,ę▓┐╔─▄ČÓė┌6éĆūįė╔Č╚;ÖCŲ„╚╦Š½Č╚░³└©Č©╬╗Š½Č╚║═ųžÅ═Č©╬╗Š½Č╚,╚ĪøQė┌Č©╬╗ĘĮ╩Į,▀\äė╦┘Č╚,┐žųŲĘĮ╩ĮĪó▒█▓┐äéČ╚,“īäėĘĮ╩ĮĪóŠÅø_ĘĮĘ©Ą╚ę“╦ž
ÖCŲ„╚╦Ą─“īäėĘĮ╩Įų„ę¬ ėąę║ē║ĪóÜŌē║ĪóļŖÜŌŻ¼ęį╝░ą┬ą═“īäėĘĮ╩Į;┐╔ęį▀MąąÖCąĄĮYśŗŽĄĮyĄ─įOėŗ;ÖCŲ„╚╦▀\äėą╬╩Į╗“ęŲäėÖCśŗĄ─▀xō±;é„äėŽĄĮyįOėŗėą│ŻęŖĄ─²X▌åé„äėĪóµ£é„äėĪó╬ü▌å╬üŚUé„äė║═ąąąŪ²X▌åé„äė
ā╚é„ĖąŲ„│Żį┌┐žųŲŽĄĮyųąŻ¼ė├ū„Ę┤üį¬╝■Ż¼Öz£yÖCŲ„╚╦ūį╔ĒĄ─ĀŅæBģóöĄ;═Ōé„ĖąŲ„ų„ę¬ė├üĒ£y┴┐ÖCŲ„╚╦ų▄▀ģŁhŠ│ģóöĄ,ę▓┐╔ęįė├üĒÖz£yšŽĄK╬’
Š½Č╚Č©┴x×ķé„ĖąŲ„Ą─▌ö│÷ųĄ┼cŲ┌═¹ųĄĄ─ĮėĮ³│╠Č╚;ųžÅ═Š½Č╚Ę┤ė│┴╦é„ĖąŲ„ČÓ┤╬▌ö│÷ų«ķgĄ─ūā╗»│╠Č╚;ÖCŲ„╚╦é„ĖąŲ„Ą─ĘĆČ©ąį║═┐╔┐┐ąį╩Ū▒ŻūCÖCŲ„╚╦─▄ē“ķLŲ┌ĘĆČ©┐╔┐┐Ąž╣żū„Ą─▒žę¬Śl╝■
ĘŪ╦┼Ę■ÖCŲ„╚╦░┤ššŅAŽ╚ŠÄ║├Ą─│╠ą“Ēśą“▀Mąą╣żū„,╩╣ė├ĮKČ╦Ž▐╬╗ķ_ĻPĪóųŲäėŲ„Īó▓ÕõN░Õ║═Č©ą“Ų„üĒ┐žųŲÖCŲ„╚╦ÖCąĄ╩ųĄ─▀\äė,╦┼Ę■┐žųŲÖCŲ„╚╦═©▀^Ę┤üé„ĖąŲ„╚ĪĄ├Ą─Ę┤üą┼╠¢┼cüĒūįĮoČ©čbų├
ĻP╣Ø╩ĮŪ“├µū°ś╦ÖCŲ„╚╦Ą─╔Ž▒█║═Ū░▒█┐╔į┌═©▀^Ąūū∙Ą─┤╣ų▒ŲĮ├µ╔Ž▀\äė;Ū“├µū°ś╦ÖCŲ„╚╦─▄ē“ū÷└’═Ō╔ņ┐sęŲäėĪóį┌┤╣ų▒ŲĮ├µ╔Ž┤╣ų▒╗ž▐Dęį╝░į┌╦«ŲĮŲĮ├µ╔Ž└@Ąūū∙ą²▐D
ŃU╦ßąŅļŖ│žĮø│Żė├6éĆå╬Ė±ŃU╦ßąŅļŖ│ž┤«┬ōŲüĒĮM│╔ś╦ĘQ×ķ12VĄ─ŃU╦ßąŅļŖ│ž;õćļŖ│ž╩ŪŃU╦ßąŅļŖ│žĄ─6Ī½7▒Č,╩╣ė├ē█├³ķL│õĘ┼ļŖų▄Ų┌┐╔ęį│¼▀^500┤╬,┴ū╦ßüåĶFõćät┐╔ęį▀_ĄĮ2000┤╬
šZę¶ūRäe─ŻēKÅ─ę¶Ņl▌ö╚ļįOéõųą½@Ą├Ą─ė├涚Z궹┼╠¢;šZčį└ĒĮŌ─ŻēK▐DōQ│╔ėŗ╦ŃÖCā╚▓┐╦∙▒Ē╩ŠĄ─ą╬╩Į╗»šZčį;ūį╚╗šZčį╔·│╔─ŻēKīóŽĄĮy▌ö│÷ą┼Žó▐DōQ│╔ė├æ¶┐╔ęį└ĒĮŌĄ─ūį╚╗šZčįĖ±╩Į
└¹ė├Ė„ĘNįŁ└ĒųŲ│╔Ą─ÜŌ¾wūįäėĘų╬÷āxęčĮøėą║▄ČÓĘNŅÉŻ¼¼Fį┌ÅVĘ║ Ąžæ¬ė├ė┌Öz£yĖ„ĘNČŠÜŌŻ¼Ęų╬÷ÜŌ¾w│╔ĘųŻ¼▒O▓ņŁhŠ│Ą╚ĘĮ├µŻ¼Č╝║═ļŖ¼FŽ¾ėąĻPŻ¼╦∙ęį╚╦éā░č╦³éāĮąū÷ļŖūė▒Ū
ė├æ¶┐╔ęįė├ūņų▒ĮėŽ“Ę■äšÖCŲ„╚╦░l▓╝ųĖ┴Ņ,Å─Č°Ė─ūā┴╦ė├æ¶į┌▓┘ū„Ę■äšÖCŲ„╚╦,─▄═©▀^┬Ģę¶Ķbäe╚╦Ą─ą─└ĒĀŅæBĄ╚å¢Ņ},▀Ć─▄ē“└ĒĮŌ╚╦Ą─Ž▓ÉéĪóæŹ┼ŁĪó¾@ėĀĪó¬qįź║═Ģß├┴Ą╚ŪķŠw




